Metaverse and VR [Q&A Session]
-
 Full Access
Full Access
-
 Virtual Full Access
Virtual Full Access
Date/Time: 06 – 17 December 2021
All presentations are available in the virtual platform on-demand.
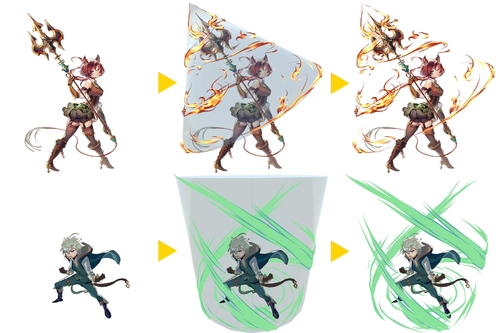
SpiCa: Stereoscopic Effect Design with 3D Pottery Wheel-type Transparent Canvas
Contributor(s):
Riwano Ikeda, Keio University, Japan
Issei Fujishiro, Keio University, Japan
Description: Flow effects can activate character illustrations, but drawing them is hard task. We propose a system called SpiCa for creating 3D flow effects surrounding characters with 3D pottery wheel-type canvases.
Spider-Man: Miles Morales - Procedural Tools for PlayStation 5 Content Authoring
Contributor(s):
Xray Halperin, Insomniac Games, United States of America
Description: For "Marvel's Spider-Man: Miles Morales" procedural systems helped artists update the setting from fall to winter and create a memorable Sony PlayStation 5 launch title.

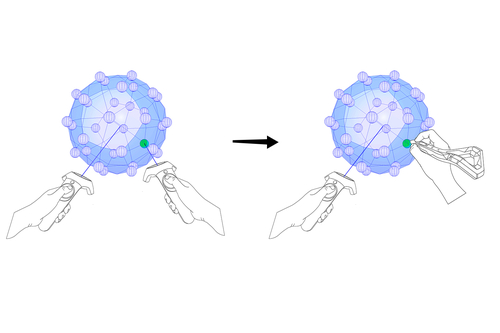
Tool-based Asymmetric interaction for Selection in VR
Contributor(s):
Qianyuan Zou, University of Auckland, Empathic Computing Lab, New Zealand
Huidong Bai, University of Auckland, New Zealand
Yuewei Zhang, University of Auckland, New Zealand
Gun Lee, University of South Australia, Australia
Allan Fowler, University of Auckland, New Zealand
Billinghurst Mark, University of Auckland, Empathic Computing Lab, New Zealand
Description: This study evaluated the performance and usability of a tool-based asymmetric input for 3D pointing tasks in VR. We found that this system is more efficient than the symmetric input.
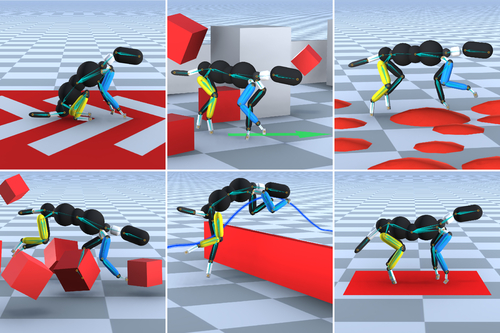
Transition Motion Tensor: A Data-Driven Approach for Versatile and Controllable Agents in Physically Simulated Environments
Contributor(s):
Jonathan Hans Soeseno, Inventec Corporation, Taiwan
Ying-Sheng Luo, Inventec Corporation, Taiwan
Trista Pei-chun Chen, Inventec Corporation, Taiwan
Wei-Chao Chen, Inventec Corporation, Taiwan
Description: This paper introduces Transition Motion Tensor, a data-driven approach that allows controllable simulated characters to adopt many motions by iteratively including the new motions while preserving previously learned ones.